Planning
This week we work as a team building a machine. While the definition of machine varies depending on context, since this week's group assignment is about "actuate and automate your machine", it simply means something that moves by itself and does certain kinds of automation.
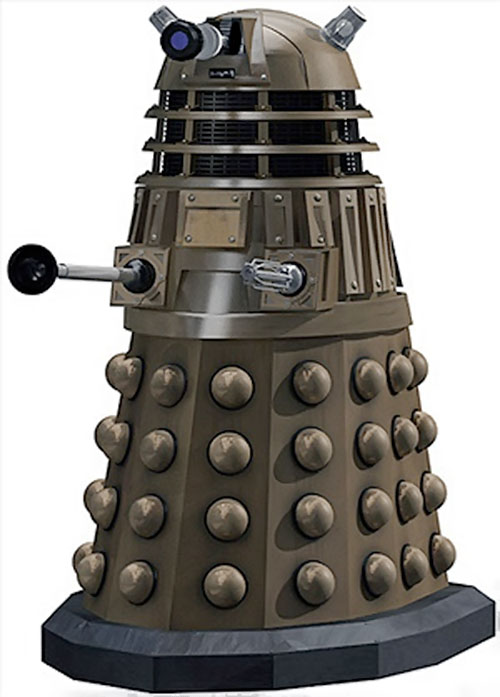
After a series of discussions, we decided to build a "Brainrotter 67" (Dalek Mode). To be honest, this is actually a cultural reference I did not know about. According to ChatGPT, a "Dalek" is a mutated alien (Kaled) living inside a tank-like armored shell, designed only to hate, conquer, and exterminate.
Project To-Dos & Design Notes
To-Do:
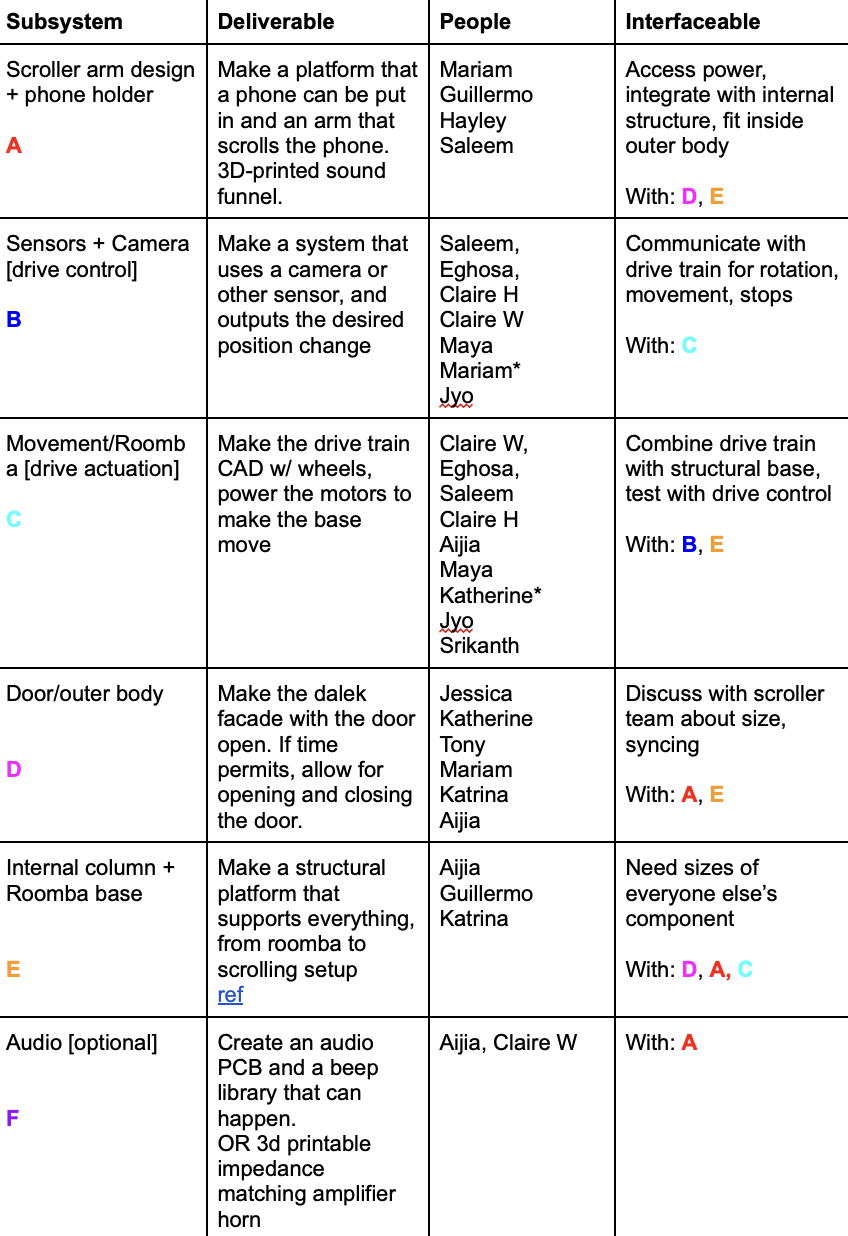
- Modular separation and assignment
- Map best design decisions to specific machine components
Design:
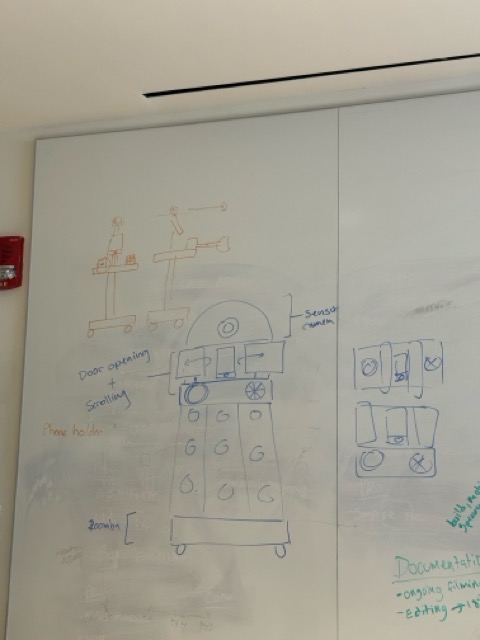
- Phone holder with adjustable bracket and selfie stick integration
- Stylus mounted on an arm for touch screen navigation
- Shutter mechanism:
- Door/hinge design for opening/closing
- Plunger with a two-axis arm (bending) to perform the reeling motion
- Rod on wheels with cardboard casing
- Mounting stylus on arm using either a gripper or a machined-in holder
- Motor control:
- Drive until phone screen is detected at target width (e.g., X pixels wide via camera)
- Or use distance sensing (e.g., LiDAR) for positioning
Additional Elements:
- Sound amplifier and speaker
References & Inspiration:
- Tinder swiper inspiration – Tinda Finger: Automatic Tinder Swiping Robot
- RoboCup omni drive guide: Soccer Guide – OmniDrive (PDF)
- Machine Week 2025 reference repo: Quentin Bolsee – Machine Week 2025
- Bracket Bot: bracket.bot
The 4 pictures shown above are from group discussion, produced by group members and uploaded to the group drive. All pictures below are taken by me and inevitably feature some classmates. Anyone who appears in these pictures and does not feel comfortable should contact me at yw1@mit.edu and ask for the picture to be taken down.
Building Process
Since I'm more comfortable using Fusion 360 for object design than for PCB design, I volunteered to work on the exterior.
Used electronics, coding, and mechanical documentation and other works are on our group page. This page mainly documents my personal contributions: specifically the body, exterior, some internal structure design in Fusion 360 and aesthetic finishing (paint spray!).
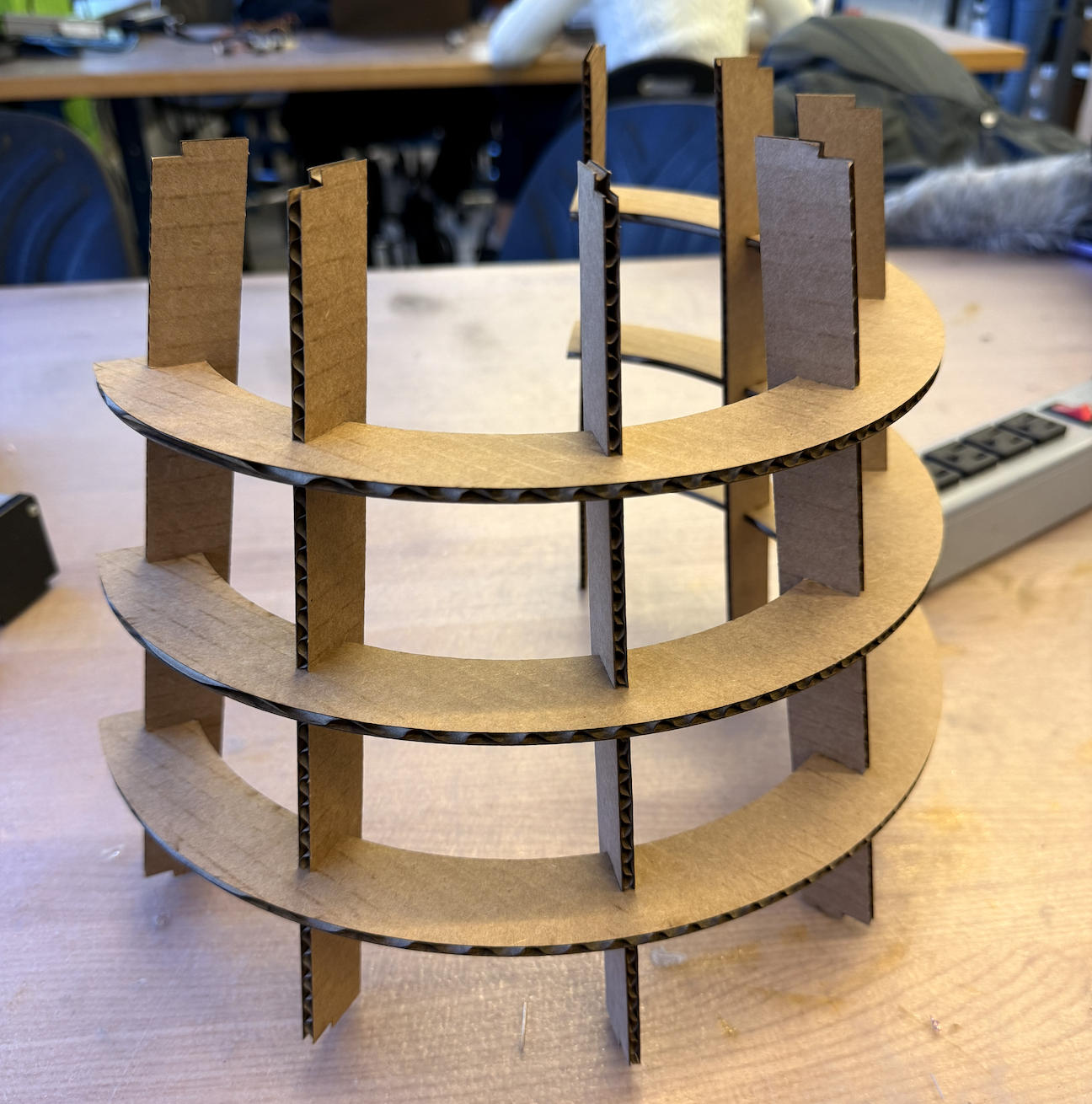
I worked with Mariam to build an initial prototype. We both felt that having a physical model would give everyone a more intuitive and direct sense of the machine's size, and it would also help the team fine-tune how to distribute the weight.






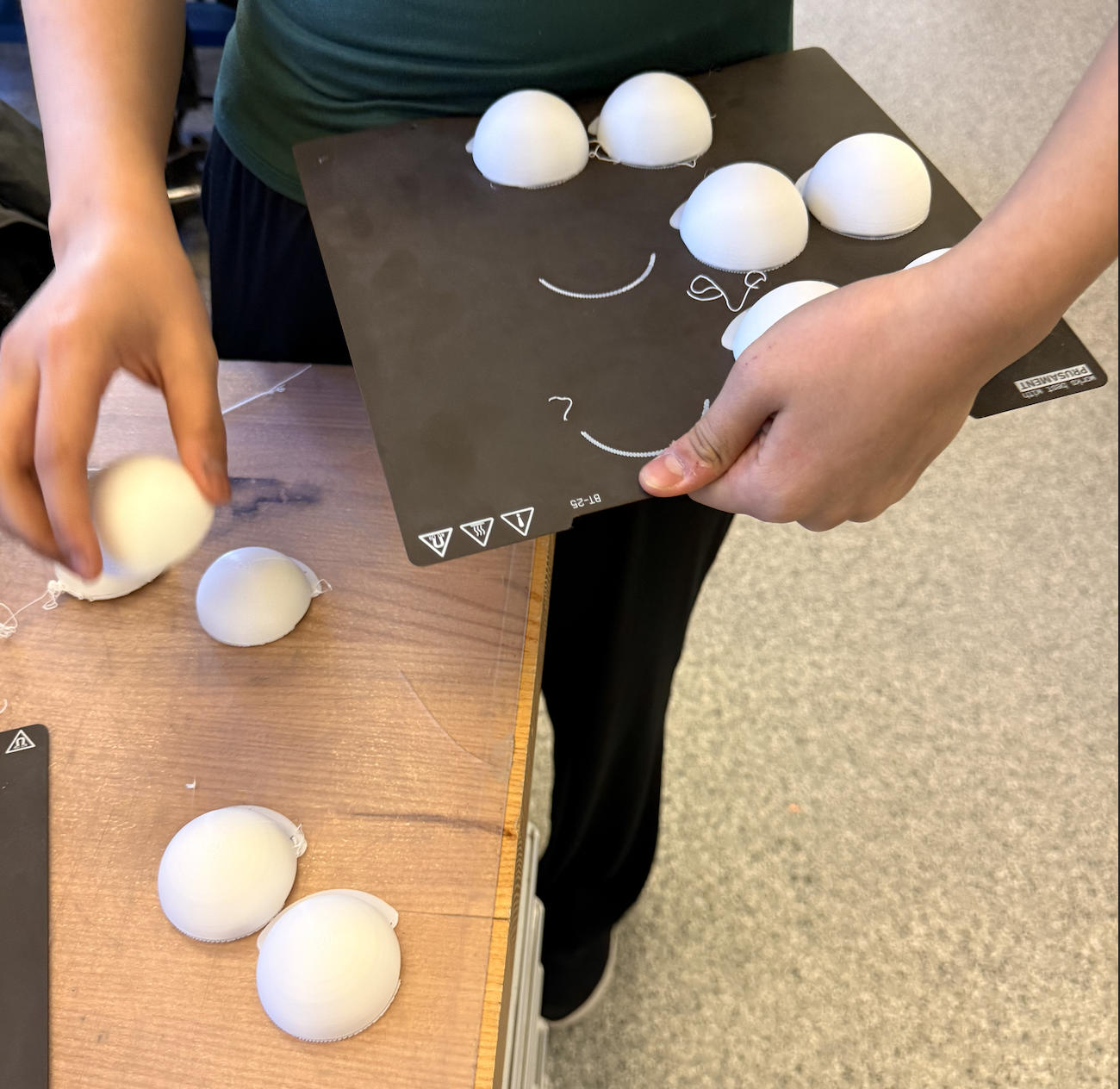
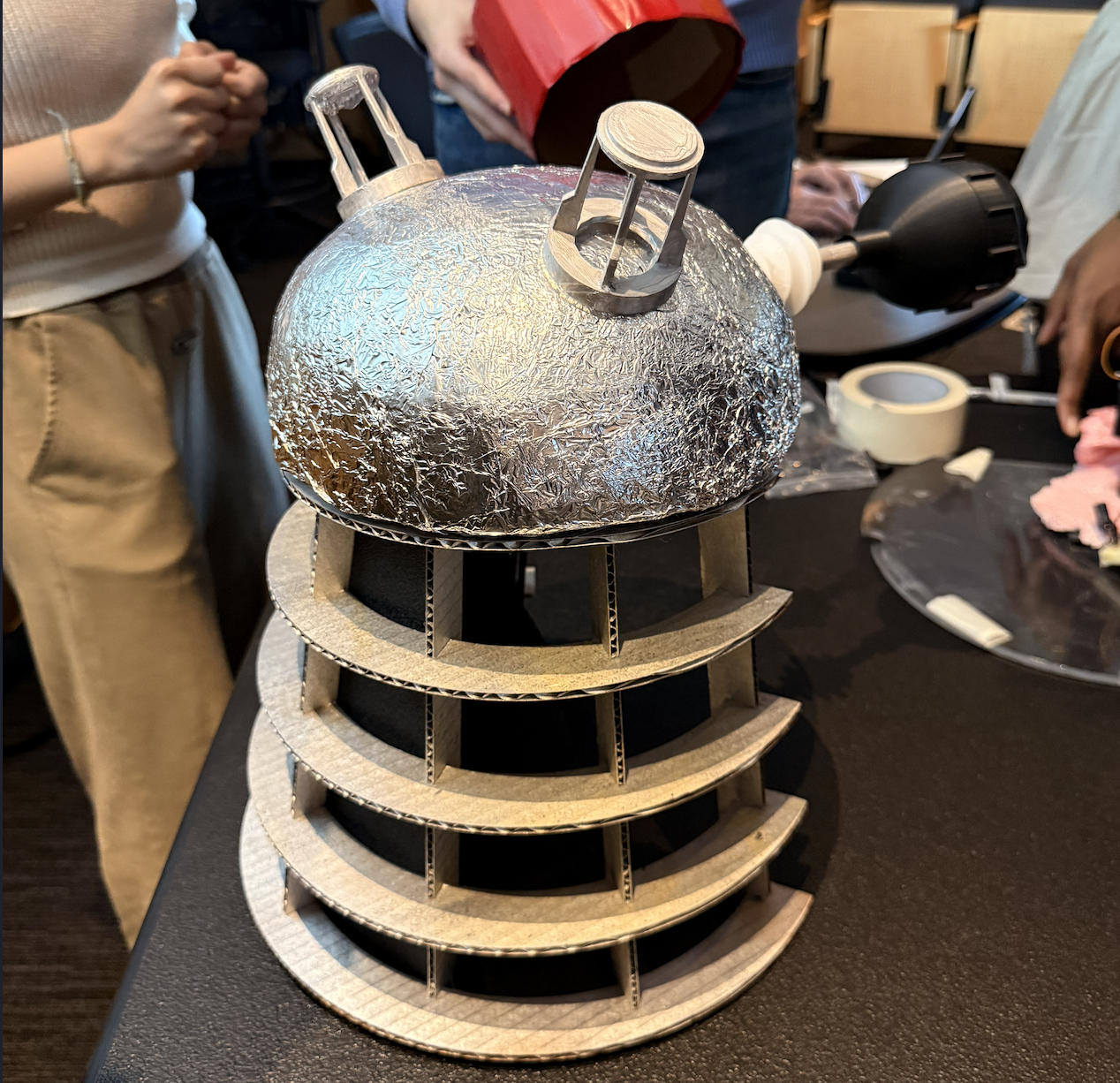
I drew the upper skeleton of Dalek in Fusion 360, and Katherine adjusted it to optimize weight support. Jessica 3D printed the ornament of the exterior. We are ready for the paint job!
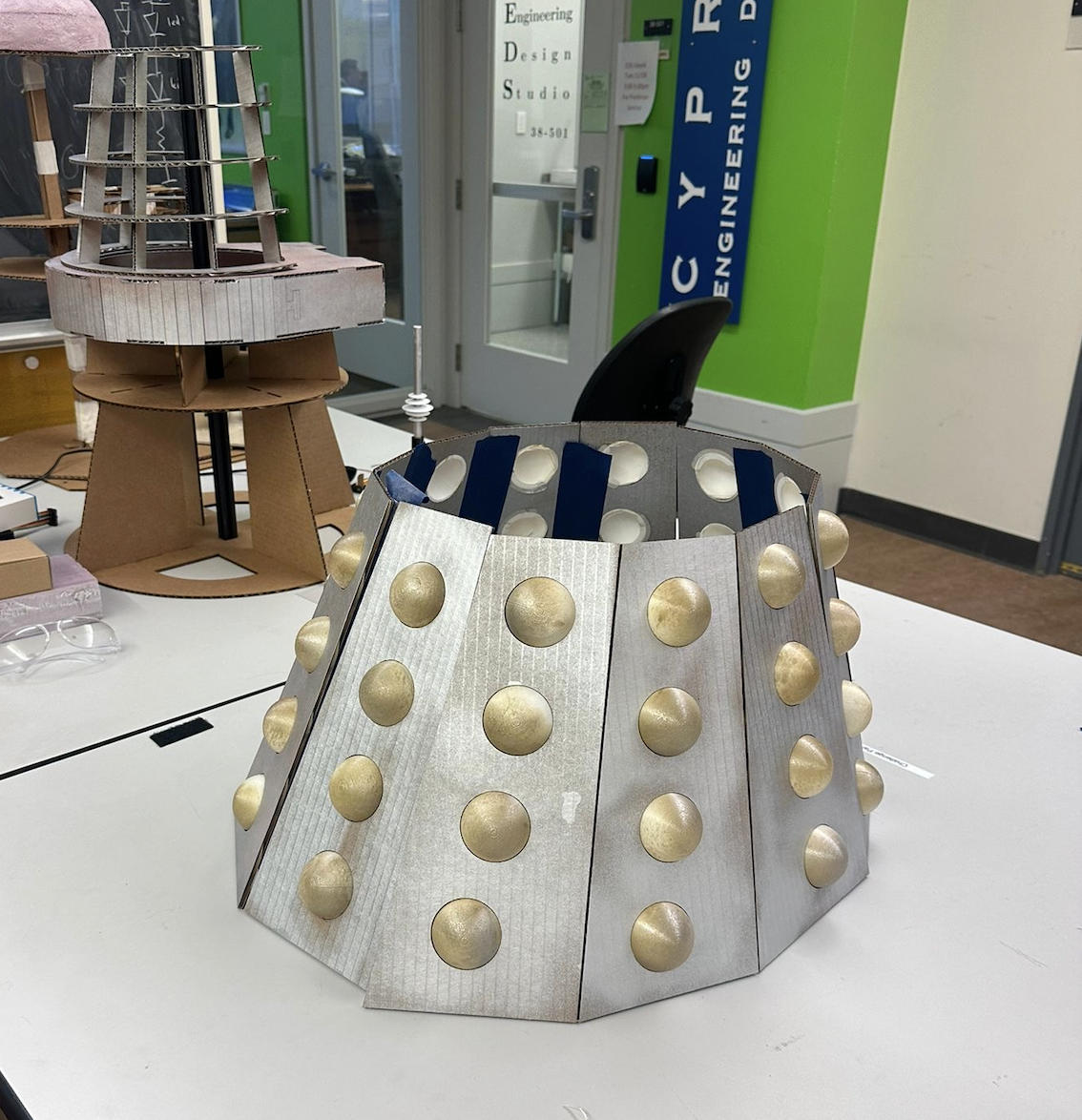
Assembly & Paint




Final Assembly


Reflections
This was a really chaotic week. Not only did we have to come up with a robot from scratch in 5 days, but I also had a final exam at Harvard and an MIT-term check up with Anthony! I was glad the team worked very efficiently and everybody really took initiative in creating all kinds of parts (even some redundant ones).
My contributions this week included:
- Building a physical mock-up/prototype (with Mariam)
- Structuring the body sections and finalizing the dimension/specs of the robot
- Shaping the top section
- Drawing/designing parts in Fusion 360 (with Katherine)
- Exterior construction
- Spray painting and finishing
This week really brings everything we learned in the previous weeks altogether, and I just realized I have so much to learn. Making things does not stop with this class—it is an endless journey of exploration and iteration. I look forward to more making in the future!